H. P. Friedrichs (AC7ZL) Homepage



My Projects
Old Robots
Summary
Robots have always held a special fascination for me. As far back as I can remember, I've tinkered with robot-like machinery.
I can remember building my first "robot" from Erector Set parts. It was about eighteen inches tall. It had a cylindrical "head" with a photosensitive resistor behind a plastic dome that would activate lights in response to changes in ambient light. The electronics were salvaged from a flashing roadside barrier that had been run over and smashed.
Along the robot's sides were two more-or-less useless arms. The right arm was terminated with a hook, and linked to a bell crank on a geared motor that allowed the arm to be raised and lowered. The left arm was terminated with a cardboard shield. The shield was wound with bare copper wire and connected to a reverse-wired audio transformer, powered through a trembler. The upshot was that this shield could deliver a pretty good jolt if you were foolish enough to touch it. It got me intro trouble when I brought the robot to class when I was in 5th grade.
Instead of feet, it rolled about on four wheels, driven by a geared motor torn out of some kind of toy. Later on I added feelers that would induce the robot to stop if he drove into a wall.
This robot would make noises, power up the shield, and start and stop rolling on the basis of a sequencer comprised of a slow-turning timer motor and a rotating contact. My dad has always been a master at woodcraft, and he machined a nifty housing of hardwood that held the motor, switch points, and sliding contractor into an integrated assembly.
Later, I remember tinkering with robot arms. One project involved a homebrew arm made of threaded rod, hardwood cleats, and pinchers made from a modified pair of bottle tongs. The design was loosely modeled after an industrial robot arm. The base of the arm was a gutted 15" speaker frame---face down on a tabletop, it provided a broad, stable platform.
Around that time Tomy came out with a toy called the Armitron. This was plastic robot arm also reminiscent of a factory robot. It was controlled by two joysticks. I was interested in trying to connect this arm to my TRS-80 Model I computer, but I ran intro problems when I discovered how the Armitron really worked.
Actually, the toy was a masterpiece of mechanical engineering. The whole thing was powered by a single motor, which drove countless pinions and gears through a series of clutches. The clutches were engaged and disengaged through the motion of the joysticks. For a long time, I pondered how to make an electrical interface to this remarkable machine.
My solution was to tear out the joysticks and install wire pushrods to control the clutches directly. Next, I mounted the Armitron and a series of small battery motors to a common base board. Each of the motors was fitted with a small bellcrank, and each bellcrank was attached to one of the pushrods.
When power was applied to one of the control motors, it began to rotate, the bellcrank moved, and the pushwire would engage or disengage the associated clutch. The motor was not allowed to spin freely, rather, it was allowed to rotate ten or twenty degrees and stall. This was not a problem if you limited the voltage to the motor.
I found that I had to add some springs to return the bellcranks to their rest position when power was removed. I used some light-gauge piano wire to make my springs.
Later, I began adding bracketry to the arm so that I could attach some potentiometers. I hoped to read the pots in order to get feedback on the position of the arm's various joints.
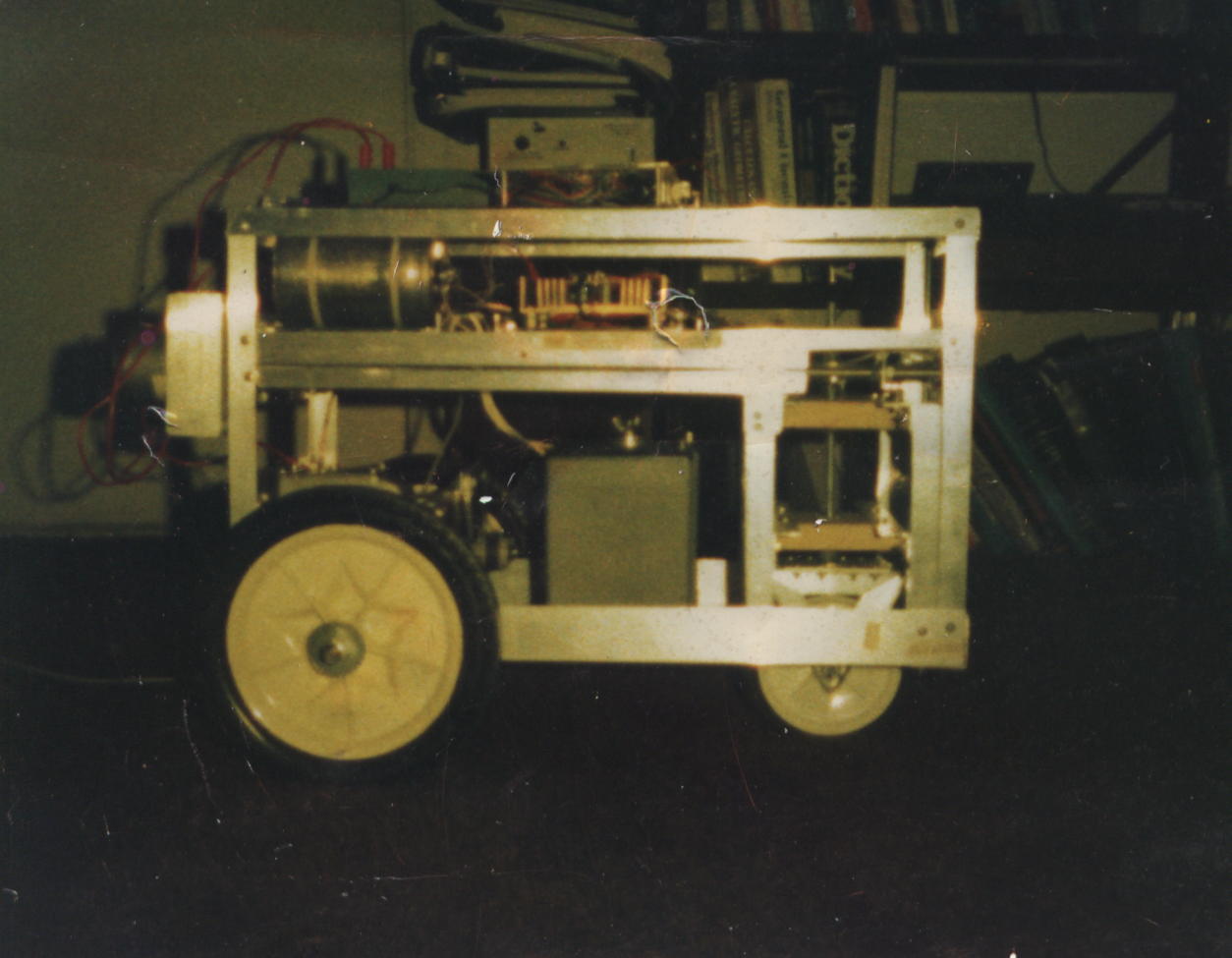
Several years after that, I started playing with some mobile platforms. The picture below is an early experiment from the mid 80's. The body was trapezoidal in shape, and fashioned from hardware-store aluminum angle. The drive train consisted of a DC motor torn out of an old Centronics printer, a worm drive salvaged from a discarded IBM keypunch, and a set of lawnmower wheels. The single front wheel did the steering, and was turned by a Rube-Goldberg mechanism consisting of another printer motor, a jackscrew, a pulley, and some cord. When you activated the steering motor, the jackscrew would turn, which advanced a nut. The nut was linked to the cord, which in turn was wrapped around a pulley attached to the steering spindle. As the nut moved, it pulled on the cord which rotated the pulley, and the steering wheel would change direction.....ok...stop laughing. It worked, and it was made out of the things I had on hand!
The robot was powered by a pair of gel cell batteries originally intended for use in an electric kiddy-car. As to the robot's intelligence, I think I was experimenting with a Timex Sinclair computer at the time.
After the trapezoidal robot, I build another machine that was cubicle in form. It had two independently-powered drive wheels and a free-wheeling caster in the front. The motors were taken from an electric kiddy car. The power supply was a great big deep cycle trolling battery. The robot base was so powerful that an adult could sit on it and drive around at a surprising rate of speed. Because the drive wheels were independent, the base could literally turn on a dime.
The cube robot was fitted with an IBM XT clone motherboard. The weird motherboard voltages were provided by a DC inverter that I hacked up. I don't remember a great deal of what I did with that machine, though I do remember that I had modified the wheel gearboxes with LEDs and phototransistors. By directing light through holes I had drilled in the gearbox's gears, I could measure speed and the distance traveled by the robot.
I also remember having modified an old Radio Shack speech synthesizer to connect to the motherboard's parallel port. Thus the cube robot could be made to utter clever things.
Alas, there is nothing left of any of my robots but the withered photograph above. In recent years, the only robot I've paid any attention to is Bender, from the Futurama cartoon.
(revised 08/04/06)
(revised 04/29/09)